Siebert, Rode, Herzog, Till, Blickhan, 2008
Model Status
This CellML model represents the [CC] model from the original published paper. Parameter values have been taken from table 2, SOL1 for the [CC] model. The CellML model runs in OpenCell to recreate the published results. The units have been checked and are consistent. The model will not run in COR due to the presence of differential algebraic equations - or "circular arguments".
Model Structure
ABSTRACT: Compared to complex structural Huxley-type models, Hill-type models phenomenologically describe muscle contraction using only few state variables. The Hill-type models dominate in the ever expanding field of musculoskeletal simulations for simplicity and low computational cost. Reasonable parameters are required to gain insight into mechanics of movement. The two most common Hill-type muscle models used contain three components. The series elastic component is connected in series to the contractile component. A parallel elastic component is either connected in parallel to both the contractile and the series elastic component (model [CC+SEC]), or is connected in parallel only with the contractile component (model [CC]). As soon as at least one of the components exhibits substantial nonlinearities, as, e.g., the contractile component by the ability to turn on and off, the two models are mechanically different. We tested which model ([CC+SEC] or [CC]) represents the cat soleus better. Ramp experiments consisting of an isometric and an isokinetic part were performed with an in situ cat soleus preparation using supramaximal nerve stimulation. Hill-type models containing force-length and force-velocity relationship, excitation-contraction coupling and series and parallel elastic force-elongation relations were fitted to the data. To test which model might represent the muscle better, the obtained parameters were compared with experimentally determined parameters. Determined in situations with negligible passive force, the force-velocity relation and the series elastic component relation are independent of the chosen model. In contrast to model [CC+SEC], these relations predicted by model [CC] were in accordance with experimental relations. In conclusion model [CC] seemed to better represent the cat soleus contraction dynamics and should be preferred in the nonlinear regression of muscle parameters and in musculoskeletal modeling.
The original paper is cited below:
Nonlinearities make a difference: comparison of two common Hill-type models with real muscle, Tobias Siebert, Christian Rode, Walter Herzog, Olaf Till and Reinhard Blickhan, 2008, Biological Cybernetics, 98, 133-143. PubMed ID: 18049823
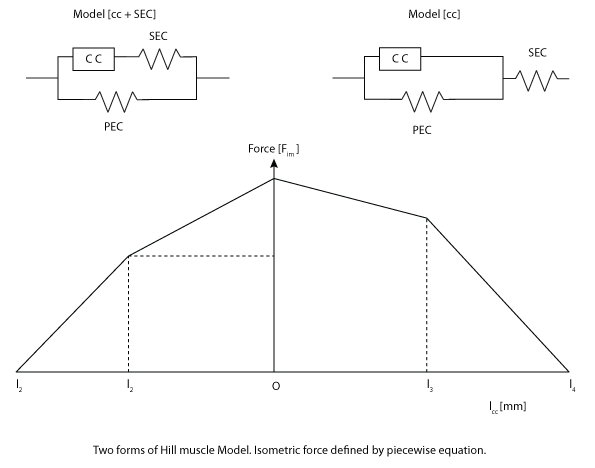 |
| Two different variants of the Hill muscle model. Isometric force is defined by a piecewise equation. |